Furuta Pendulum
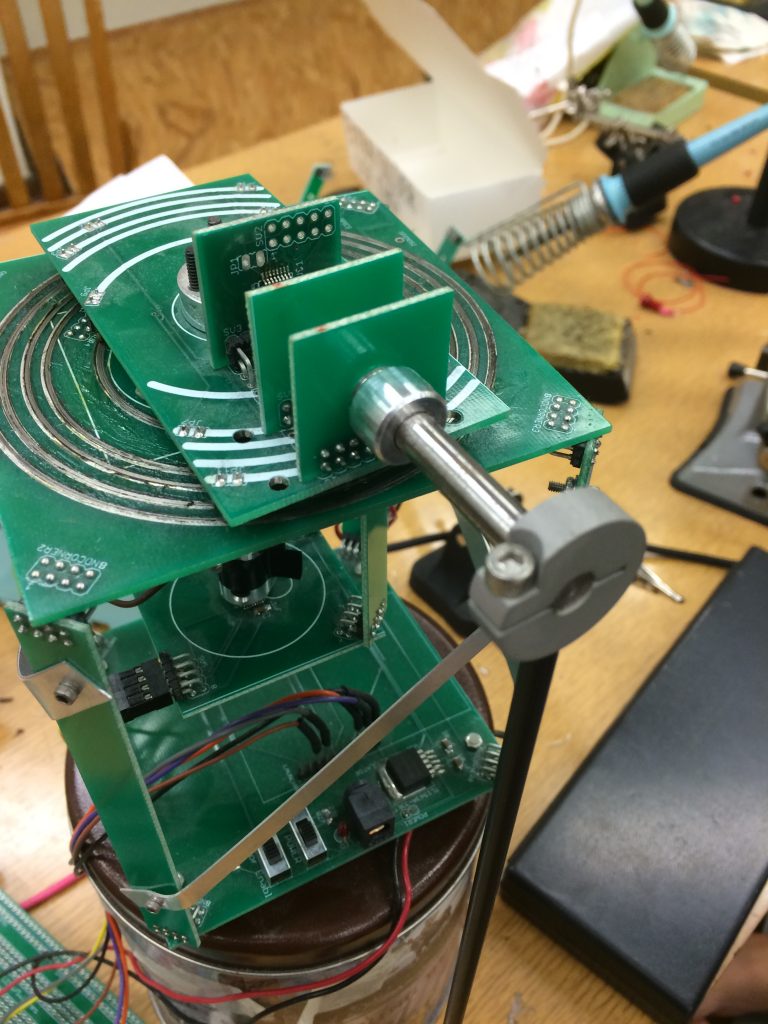
Summary: For a side project during the Fall 2015 semester, I built a Furuta Pendulum with a structure mostly built out of PCBs. An MSP430 was used as the controller for the device. Each axle has a magnet attached to it where a rotary position sensor (AS5145) is used to track the axle’s angular position. Ball bearings are used for the axles. Spring-loaded pogo pins are used for the electrical contact of the horizontal axis to the vertical. For the balancing rod, nuts are added to decrease the mechanical response, allowing the linear control algorithm to balance the rod.
Thank you Dan Block for helping me build the pendulum and allowing me to use your lab.
Gallery
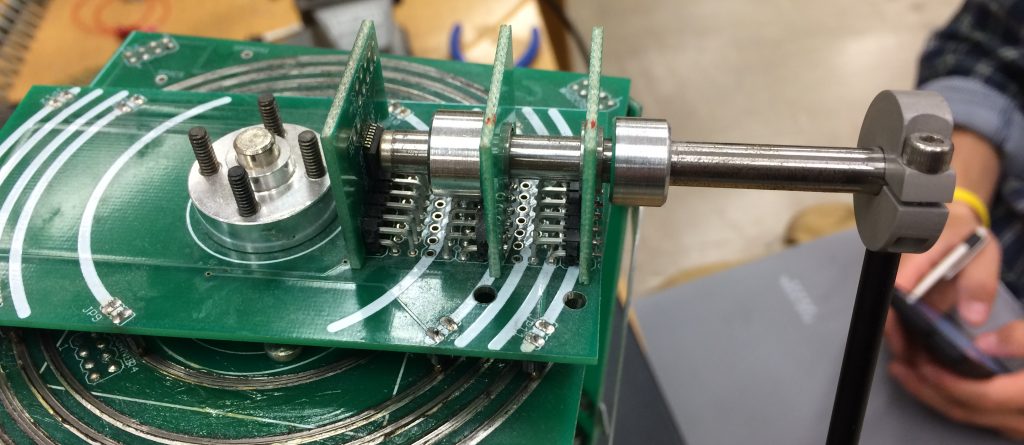
Top View
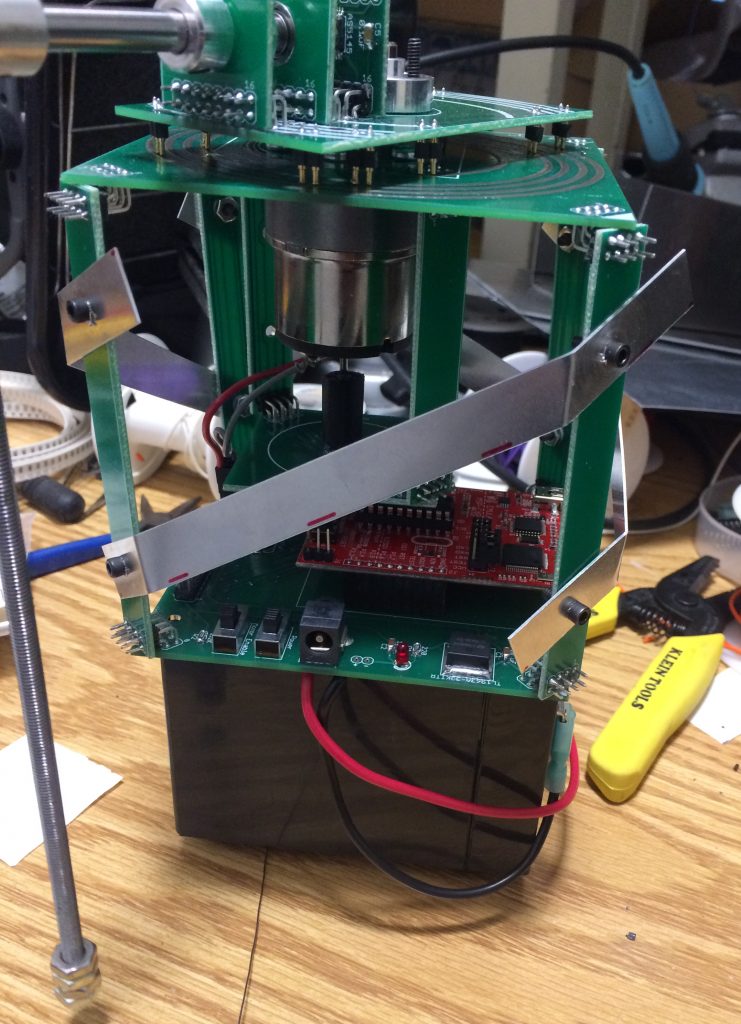
Side View